Die Zusammenarbeit von Mensch und Roboter – Möglichkeiten, Ziele, Grenzen
Jeder Robotereinsatz hat nur dann Sinn, wenn er dem Menschen nützt. Der Nutzen eines Roboters entsteht durch seine Fähigkeit, uns von Arbeit zu befreien, die wir nicht machen können oder wollen. Bei der Mensch-Roboter-Kooperation geht es um Arbeitsplätze, an denen der Mensch ohne trennende Schutzeinrichtungen direkt mit einem Roboter zusammenarbeitet. Dadurch wird z.B. die höhere Flexibilität des Menschen mit der größeren Ausdauer und Genauigkeit der Maschine kombiniert. Das vorliegende Handbuch beschreibt alle wichtigen Aspekte, die beim Einsatz von kollaborativen Robotern eine Rolle spielen:
- das Geschäfts- und Wettbewerbsumfeld – Wo und wann lohnt sich der Einsatz von kollaborativen Robotern überhaupt?- der vorhandene Maschinenpark im Unternehmen – Passen Roboter da hinein oder muss man zusätzliche Investitionen einplanen?- Arbeitsschutz – Sind Roboter unter allen Umständen sicher?- Technik – Welche Typen gibt es, welche Steuerungskonzepte gibt es?- Produktionsprozesse – Wie werden Roboter auf allen Ebenen erfolgreich integriert, ohne Menschen zu benachteiligen?
Zahlreiche Beispiele aus verschiedenen Branchen zeigen die verschiedenen Einsatzszenarien von kollaborativen Industrierobotern. Ein eigenes Kapitel widmet sich zukünftigen Anwendungen, unter anderem im Servicebereich. Dieses Buch ist ein Muss für alle, die den Roboter jenseits der Großserie für eine wandelbare Produktionsumgebung einsetzen möchten.
Aktualisiert: 2023-05-02
> findR *
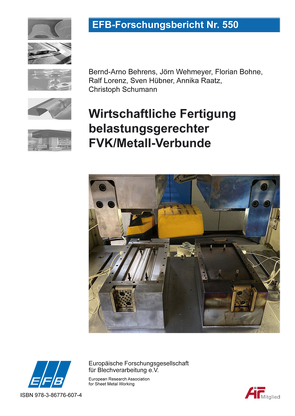
Im Projekt wird eine Fertigungszelle zum gemeinsamen Umformen und wärmeunterstützten Pressfügen von Stählen und Endlosfaser verstärkten thermoplastischen Kunststoffen in Form von sogenannten unidirektionalen Carbon-Faser-Tapes entwickelt.
Durch die automatisierte Handhabung der Halbzeuge mittels zweier Roboter und ein isothermes, zweigeteiltes Werkzeugkonzept können die Taktzeiten reduziert werden.
Verschiedene Untersuchungen bestätigen für die Verbundbauteile eine höhere spezifische Belastbarkeit als bei einem reinen Stahlbauteil.
https://ble-x.de/mydocs/1650
Aktualisiert: 2021-07-29
> findR *

Strengere CO2–Grenzwertregelungen in der Politik haben in der Mobilitätsbranche einen Wandel mit der Abkehr vom Verbrennungsmotor hin zur Elektromobilität initiiert. Die Energie, welche für die Beschleunigung eines Kraftfahrzeugs aufgebracht werden muss, hängt maßgeblich von der Fahrzeugmasse ab. Eine Möglichkeit zur Gewichtsreduktion ist der Einsatz von Faserverbundwerkstoffen.
Mit dieser Dissertation wird ein Beitrag für die Entwicklung von automatisierten Thermoformprozessen für die Organoblechverarbeitung geleistet. Um die bis heute vorherrschenden engen Formgebungsgrenzen von Organoblech zu erweitern wird ein aktives Materialführungssystem für den Herstellungsprozess entwickelt und erprobt.
Aufgrund von unbekannten Prozessparametern wird zur Auslegung der Materialführung auf einen simulationsgestützten Ansatz mittels FEM zurückgegriffen. Dadurch lassen sich Fehlstellen im Organoblech, wie bspw. Falten, aufgrund einer unzureichenden Materialführung im Prozess vorhersagen.
Aktualisiert: 2020-09-09
> findR *

Strengere CO2–Grenzwertregelungen in der Politik haben in der Mobilitätsbranche einen Wandel mit der Abkehr vom Verbrennungsmotor hin zur Elektromobilität initiiert. Die Energie, welche für die Beschleunigung eines Kraftfahrzeugs aufgebracht werden muss, hängt maßgeblich von der Fahrzeugmasse ab. Eine Möglichkeit zur Gewichtsreduktion ist der Einsatz von Faserverbundwerkstoffen.
Mit dieser Dissertation wird ein Beitrag für die Entwicklung von automatisierten Thermoformprozessen für die Organoblechverarbeitung geleistet. Um die bis heute vorherrschenden engen Formgebungsgrenzen von Organoblech zu erweitern wird ein aktives Materialführungssystem für den Herstellungsprozess entwickelt und erprobt.
Aufgrund von unbekannten Prozessparametern wird zur Auslegung der Materialführung auf einen simulationsgestützten Ansatz mittels FEM zurückgegriffen. Dadurch lassen sich Fehlstellen im Organoblech, wie bspw. Falten, aufgrund einer unzureichenden Materialführung im Prozess vorhersagen.
Aktualisiert: 2020-11-05
> findR *
Deutschland ist im Weltmaßstab eine bedeutende Industrienation. Bei der Herstellung komplexer Industriegüter hat die Montage einen entscheidenden Anteil an der Wertschöpfung. Vor diesem Hintergrund hat das Bundesministerium für Bildung und Forschung (BMBF) im Jahr 2015 den Ideenwettbewerb „Kompetenz Montage – kollaborativ und wandlungsfähig“ ausgerufen. Wissenschaft und Praxis haben in dreijährigen gemeinsamen Forschungs- und Entwicklungsaktivitäten viele neue Systemlösungen für die Montage erarbeitet. Dabei war es den 80 Projektpartnern ein besonderes Anliegen, ihre Ergebnisse direkt in der betrieblichen Praxis auf ihre Tauglichkeit zu überprüfen.
Der vorliegende Projektatlas bereitet die Ergebnisse in einer neuartigen, anschaulichen Form auf. Mit dem Format des „Atlas“ wird der Versuch unternommen, alle Aspekte der Montageautomatisierung aus dem jeweiligen Blickwinkel verschiedener betrieblicher Akteure zu betrachten. Der Atlas wendet sich damit vor allem an Management, Betriebsrat, Arbeitsplanung, Arbeitssicherheitsverantwortliche, Controlling, Produktionsleitung, Personalplanung und Fachkräfte in der Montage. Damit die Gestaltung zukünftiger Montagesysteme ein Erfolg wird, sollten möglichst alle relevanten Personengruppen angemessen beteiligt werden. Wie dies gelingt, zeigen wir in den einzelnen Kapiteln des Atlas.
Die Herausgeber
Aktualisiert: 2020-07-01
Autor:
Wilhelm Bauer,
Sebastian Blankemeyer,
Ulrich Bobe,
Jochen Deuse,
Christoph Gielisch,
Frank Hees,
Kurt Heinen,
Werner Herfs,
Gabriele Höptner,
Guido Hüttemann,
Alfred Hypki,
Max Körner,
Bernd Kuhlenkötter,
Tristan Langer,
Sarah Müller-Abdelrazeq,
Peter Nyhuis,
Sebastian Ortmann,
Magdalena Paul,
Annika Raatz,
Peter Rally,
Gunther Reinhart,
Tobias Reissmann,
Simon Roggendorf,
Kerstin Rook-Weiler,
Axel Schmidt,
Robert Schmitt,
Robin Schulze,
Volker Sieber,
Kirsten Tracht,
Michael Voss,
André Zimmermann

In der Produktionstechnik werden für Pick-and-Place-Prozesse vielfach automatisierte Handhabungssysteme mit Hybridstruktur eingesetzt. Überwiegend bestehen solche Systeme aus einer Delta-Parallelstruktur zur Positionierung des Endeffektors, die um eine Rotationsachse seriell erweitert ist. Zunehmend reicht diese Beweglichkeit jedoch nicht mehr aus, um das System an neue Produktionsverhältnisse anzupassen. Infolgedessen kommt das Bestreben auf, weitere Bewegungsfreiheiten über eine Orientierungseinheit in der Form einer Strukturerweiterung zu ermöglichen.
In der vorliegenden Arbeit wird hierfür der Ansatz der Unteraktuierung verfolgt, bei dem eine Orientierungseinheit mit passiven Gelenken als Modul am Werkzeugflansch des Handhabungssystems befestigt wird. Zentrale Themen dieser Arbeit sind die aufgabenorientierte Synthese solcher Systeme, die Regelung des typischerweise nichtlinearen Systemverhaltens und die Integration der Orientierungsvorgänge in den Handhabungsprozess.
Der Ansatz der Unteraktuierung bedingt den Verzicht auf zusätzliche Antriebe und ermöglicht es, die Kosten und den Eingriff in die Dynamik des Robotersystems infolge der reduzierten bewegten Robotermasse gering zu halten. Ebenso wird durch den modularen Charakter der Orientierungseinheit der Eingriff in das bestehende Robotersystem reduziert, wodurch letztlich die Rekonfigurierbarkeit sichergestellt wird.
Aktualisiert: 2020-07-10
> findR *
Die Zusammenarbeit von Mensch und Roboter – Möglichkeiten, Ziele, Grenzen
Jeder Robotereinsatz hat nur dann Sinn, wenn er dem Menschen nützt. Der Nutzen eines Roboters entsteht durch seine Fähigkeit, uns von Arbeit zu befreien, die wir nicht machen können oder wollen. Bei der Mensch-Roboter-Kooperation geht es um Arbeitsplätze, an denen der Mensch ohne trennende Schutzeinrichtungen direkt mit einem Roboter zusammenarbeitet. Dadurch wird z.B. die höhere Flexibilität des Menschen mit der größeren Ausdauer und Genauigkeit der Maschine kombiniert. Das vorliegende Handbuch beschreibt alle wichtigen Aspekte, die beim Einsatz von kollaborativen Robotern eine Rolle spielen:
- das Geschäfts- und Wettbewerbsumfeld – Wo und wann lohnt sich der Einsatz von kollaborativen Robotern überhaupt?
- der vorhandene Maschinenpark im Unternehmen – Passen Roboter da hinein oder muss man zusätzliche Investitionen einplanen?
- Arbeitsschutz – Sind Roboter unter allen Umständen sicher?
- Technik – Welche Typen gibt es, welche Steuerungskonzepte gibt es?
- Produktionsprozesse – Wie werden Roboter auf allen Ebenen erfolgreich integriert, ohne Menschen zu benachteiligen?
Zahlreiche Beispiele aus verschiedenen Branchen zeigen die verschiedenen Einsatzszenarien von kollaborativen Industrierobotern. Ein eigenes Kapitel widmet sich zukünftigen Anwendungen, unter anderem im Servicebereich. Dieses Buch ist ein Muss für alle, die den Roboter jenseits der Großserie für eine wandelbare Produktionsumgebung einsetzen möchten.
Aktualisiert: 2022-11-15
> findR *

In der Produktionstechnik werden für Pick-and-Place-Prozesse vielfach automatisierte Handhabungssysteme mit Hybridstruktur eingesetzt. Überwiegend bestehen solche Systeme aus einer Delta-Parallelstruktur zur Positionierung des Endeffektors, die um eine Rotationsachse seriell erweitert ist. Zunehmend reicht diese Beweglichkeit jedoch nicht mehr aus, um das System an neue Produktionsverhältnisse anzupassen. Infolgedessen kommt das Bestreben auf, weitere Bewegungsfreiheiten über eine Orientierungseinheit in der Form einer Strukturerweiterung zu ermöglichen.
In der vorliegenden Arbeit wird hierfür der Ansatz der Unteraktuierung verfolgt, bei dem eine Orientierungseinheit mit passiven Gelenken als Modul am Werkzeugflansch des Handhabungssystems befestigt wird. Zentrale Themen dieser Arbeit sind die aufgabenorientierte Synthese solcher Systeme, die Regelung des typischerweise nichtlinearen Systemverhaltens und die Integration der Orientierungsvorgänge in den Handhabungsprozess.
Der Ansatz der Unteraktuierung bedingt den Verzicht auf zusätzliche Antriebe und ermöglicht es, die Kosten und den Eingriff in die Dynamik des Robotersystems infolge der reduzierten bewegten Robotermasse gering zu halten. Ebenso wird durch den modularen Charakter der Orientierungseinheit der Eingriff in das bestehende Robotersystem reduziert, wodurch letztlich die Rekonfigurierbarkeit sichergestellt wird.
Aktualisiert: 2019-11-07
> findR *
MEHR ANZEIGEN
Bücher von Raatz, Annika
Sie suchen ein Buch oder Publikation vonRaatz, Annika ? Bei Buch findr finden Sie alle Bücher Raatz, Annika.
Entdecken Sie neue Bücher oder Klassiker für Sie selbst oder zum Verschenken. Buch findr hat zahlreiche Bücher
von Raatz, Annika im Sortiment. Nehmen Sie sich Zeit zum Stöbern und finden Sie das passende Buch oder die
Publiketion für Ihr Lesevergnügen oder Ihr Interessensgebiet. Stöbern Sie durch unser Angebot und finden Sie aus
unserer großen Auswahl das Buch, das Ihnen zusagt. Bei Buch findr finden Sie Romane, Ratgeber, wissenschaftliche und
populärwissenschaftliche Bücher uvm. Bestellen Sie Ihr Buch zu Ihrem Thema einfach online und lassen Sie es sich
bequem nach Hause schicken. Wir wünschen Ihnen schöne und entspannte Lesemomente mit Ihrem Buch
von Raatz, Annika .
Raatz, Annika - Große Auswahl an Publikationen bei Buch findr
Bei uns finden Sie Bücher aller beliebter Autoren, Neuerscheinungen, Bestseller genauso wie alte Schätze. Bücher
von Raatz, Annika die Ihre Fantasie anregen und Bücher, die Sie weiterbilden und Ihnen wissenschaftliche Fakten
vermitteln. Ganz nach Ihrem Geschmack ist das passende Buch für Sie dabei. Finden Sie eine große Auswahl Bücher
verschiedenster Genres, Verlage, Schlagworte Genre bei Buchfindr:
Unser Repertoire umfasst Bücher von
Sie haben viele Möglichkeiten bei Buch findr die passenden Bücher für Ihr Lesevergnügen zu entdecken. Nutzen Sie
unsere Suchfunktionen, um zu stöbern und für Sie interessante Bücher in den unterschiedlichen Genres und Kategorien
zu finden. Neben Büchern von Raatz, Annika und Büchern aus verschiedenen Kategorien finden Sie schnell und
einfach auch eine Auflistung thematisch passender Publikationen. Probieren Sie es aus, legen Sie jetzt los! Ihrem
Lesevergnügen steht nichts im Wege. Nutzen Sie die Vorteile Ihre Bücher online zu kaufen und bekommen Sie die
bestellten Bücher schnell und bequem zugestellt. Nehmen Sie sich die Zeit, online die Bücher Ihrer Wahl anzulesen,
Buchempfehlungen und Rezensionen zu studieren, Informationen zu Autoren zu lesen. Viel Spaß beim Lesen wünscht Ihnen
das Team von Buchfindr.